12. Update Step
Update Step
Note that the x and y errors are depicted from the point of view of the map (x is horizontal, y is vertical) rather than the point of view of the car where x is in the direction of the car’s heading,( i.e. It points to where the car is facing), and y is orthogonal (90 degrees) to the left of the x-axis (pointing out of the left side of the car).
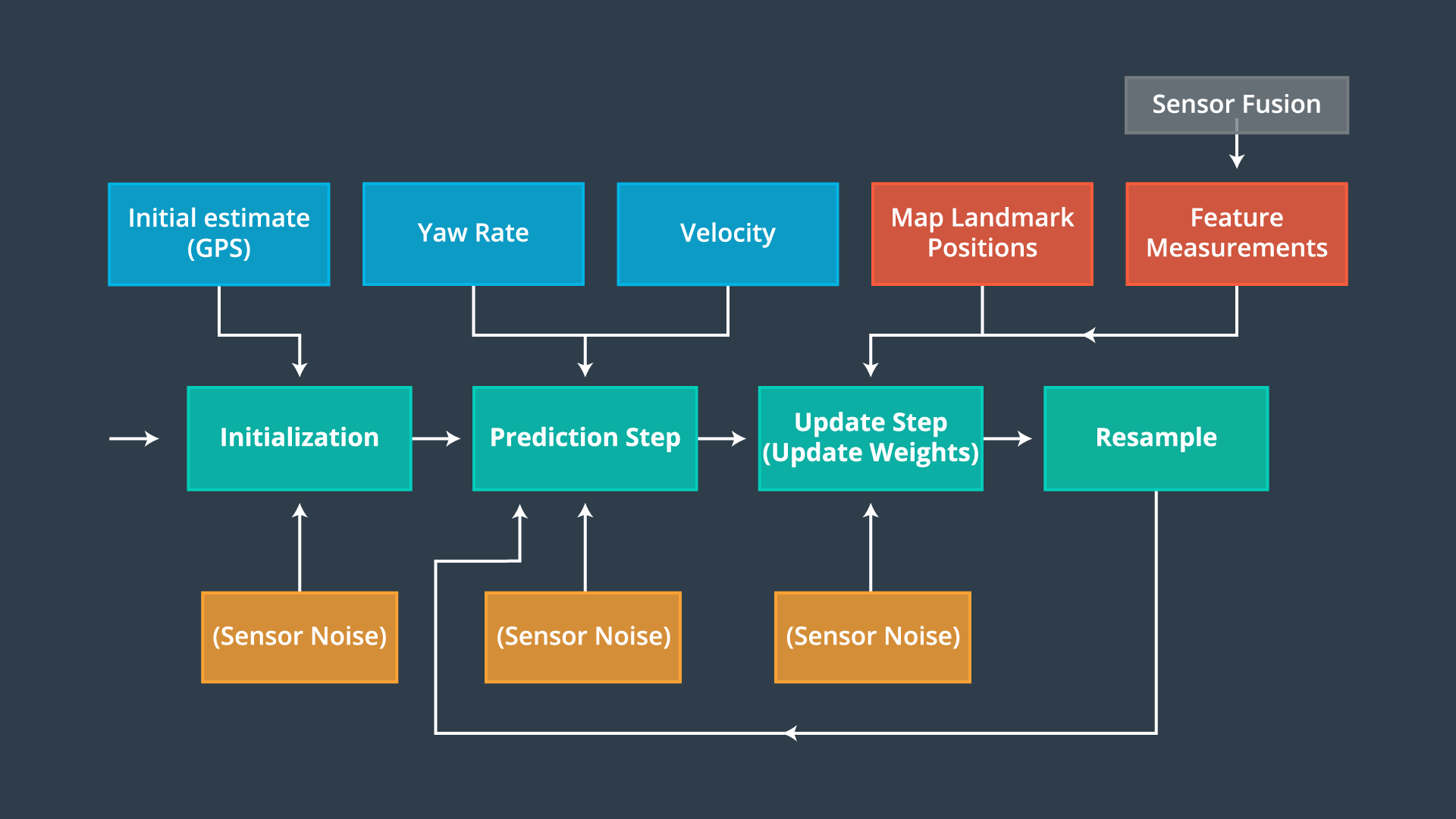
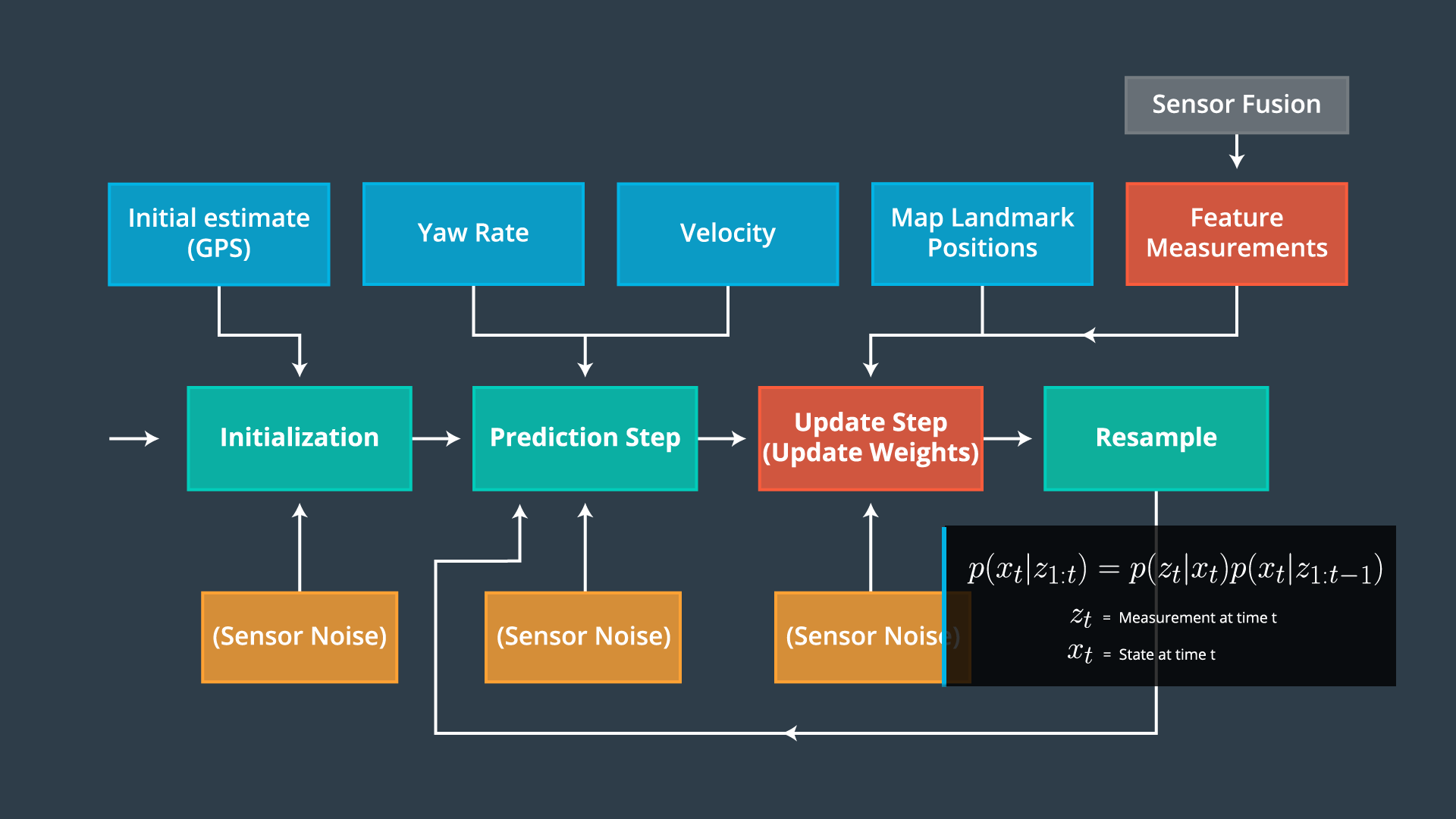
Now that we have incorporated velocity and yaw rate measurement inputs into our filter, we must update particle weights based on LIDAR and RADAR readings of landmarks. We will practice calculating particle weights, later in this lesson, with the Particle Weights Quiz.